
目录
快速导航-

电子技术 | 基于掠鸟迁徙的干扰资源动态分配方法
电子技术 | 基于掠鸟迁徙的干扰资源动态分配方法
-

电子技术 | 基于Savitzky-Golay滤波和互模糊函数的时频差参数估计算法
电子技术 | 基于Savitzky-Golay滤波和互模糊函数的时频差参数估计算法
-

电子技术 | 复杂环境下天基无源协同多目标初始定轨方法
电子技术 | 复杂环境下天基无源协同多目标初始定轨方法
-

电子技术 | 基多端口网络的电场辐射发射试验仿真方法
电子技术 | 基多端口网络的电场辐射发射试验仿真方法
-

电子技术 | 跨尺度特征融合的遥感微小目标检测算法
电子技术 | 跨尺度特征融合的遥感微小目标检测算法
-

电子技术 | 高光谱卫星舰船目标检测效能分析与建模研究
电子技术 | 高光谱卫星舰船目标检测效能分析与建模研究
-

传感器与信号处理 | 基于深度Q学习的组网雷达闪烁探测调度方法
传感器与信号处理 | 基于深度Q学习的组网雷达闪烁探测调度方法
-

传感器与信号处理 | 隧道环境毫米波雷达目标识别与分类算法
传感器与信号处理 | 隧道环境毫米波雷达目标识别与分类算法
-

传感器与信号处理 | 多维参数谱重构的FDA-MIMO雷达超分辨目标定位方法
传感器与信号处理 | 多维参数谱重构的FDA-MIMO雷达超分辨目标定位方法
-

传感器与信号处理 | 结合足迹和相位信息的SAR高层建筑三维重建
传感器与信号处理 | 结合足迹和相位信息的SAR高层建筑三维重建
-

传感器与信号处理 | 相干FDA雷达收发联合多波束方法
传感器与信号处理 | 相干FDA雷达收发联合多波束方法
-

传感器与信号处理 | 基于KKT最优性条件的频点可控FSK-PSK波形设计算法
传感器与信号处理 | 基于KKT最优性条件的频点可控FSK-PSK波形设计算法
-

传感器与信号处理 | 交互式多模型概率数据关联抗速度拖引干扰算法
传感器与信号处理 | 交互式多模型概率数据关联抗速度拖引干扰算法
-

系统工程 | 一种基于ML-PMRF的复杂仿真系统可信度智能分配方法
系统工程 | 一种基于ML-PMRF的复杂仿真系统可信度智能分配方法
-

系统工程 | 基于CGSPN的复杂电子系统测试性参数确定方法
系统工程 | 基于CGSPN的复杂电子系统测试性参数确定方法
-

系统工程 | 基于UAF的装备作战试验指标体系构建方法
系统工程 | 基于UAF的装备作战试验指标体系构建方法
-

系统工程 | MBSE在载人航天在轨物资补给任务中的应用
系统工程 | MBSE在载人航天在轨物资补给任务中的应用
-

系统工程 | 考虑指标协同效应重构的联合作战体系效能评估灰色主成分模型
系统工程 | 考虑指标协同效应重构的联合作战体系效能评估灰色主成分模型
-

系统工程 | 面向能力需求的装备组合配置分析方法
系统工程 | 面向能力需求的装备组合配置分析方法
-

系统工程 | 面向区域防空场景的杀伤链设计方法
系统工程 | 面向区域防空场景的杀伤链设计方法
-

系统工程 | 基于二次优化的T-R"型多基地声纳部署方法
系统工程 | 基于二次优化的T-R"型多基地声纳部署方法
-

系统工程 | 基于改进灰狼算法的多弹种瞄准点选择方法
系统工程 | 基于改进灰狼算法的多弹种瞄准点选择方法
-

系统工程 | 基于FP-Growth的目标编队规律挖掘模型
系统工程 | 基于FP-Growth的目标编队规律挖掘模型
-

制导、导航与控制 | 基于高阶固定时间观测器的高超变体飞行器预设性能控制
制导、导航与控制 | 基于高阶固定时间观测器的高超变体飞行器预设性能控制
-

制导、导航与控制 | 航天器非脆弱控制理论及应用研究进展
制导、导航与控制 | 航天器非脆弱控制理论及应用研究进展
-

制导、导航与控制 | 控制约束下的高超声速飞行器轨迹优化策略
制导、导航与控制 | 控制约束下的高超声速飞行器轨迹优化策略
-

制导、导航与控制 | 采用势函数的三自由度气浮模拟器追逃策略
制导、导航与控制 | 采用势函数的三自由度气浮模拟器追逃策略
-
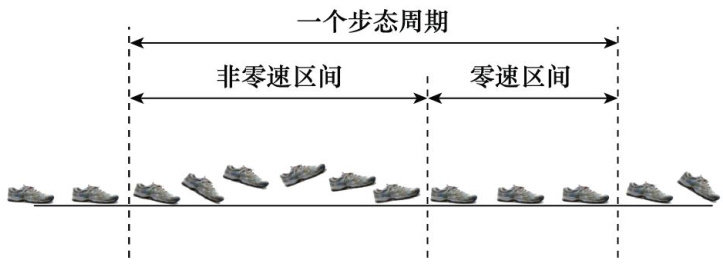
制导、导航与控制 | 基于全区间航向误差预测与校正的惯性行人导航算法研究
制导、导航与控制 | 基于全区间航向误差预测与校正的惯性行人导航算法研究
-

制导、导航与控制 | 基于目标分配的多弹协同分层拦截制导策略
制导、导航与控制 | 基于目标分配的多弹协同分层拦截制导策略
-

通信与网络 | 基于聚类算法的星载ADS-B波束自适应调整方法
通信与网络 | 基于聚类算法的星载ADS-B波束自适应调整方法
-

通信与网络 | 基于二次分解的混合神经网络蜂窝流量预测
通信与网络 | 基于二次分解的混合神经网络蜂窝流量预测
-

通信与网络 | LDPC的分段多因子最小和译码算法
通信与网络 | LDPC的分段多因子最小和译码算法
-

通信与网络 | 通信故障下基于一跳无人机编队拓扑重构
通信与网络 | 通信故障下基于一跳无人机编队拓扑重构
-

通信与网络 | 面向海上无人系统的边缘模型协同与数据压缩算法
通信与网络 | 面向海上无人系统的边缘模型协同与数据压缩算法
















 登录
登录